- 一、机器人关节
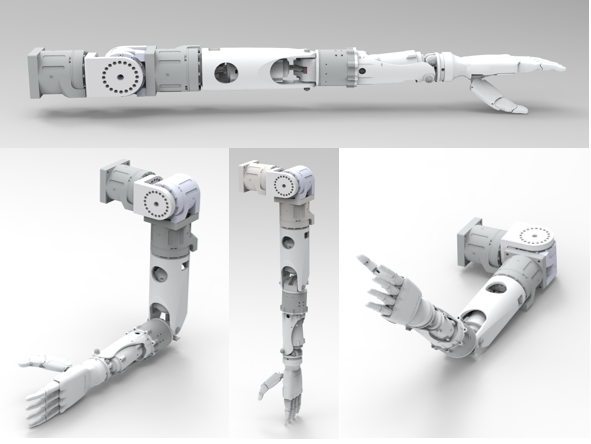
- 二、高承载机械臂
- 三、智能机器人
1、直线关节模组
直线关节模组是由无框力矩电机、行星滚柱丝杠、力传����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������感器、编码器、驱动器等核心零部件组成����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������,采用行星滚柱丝杠螺母与无框力矩电机����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������转子一体化设计,可以实现精准的����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ����������� ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ��������Ƴ�������速度控制、位置控制和力����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������控制。相对于旋转关节,具有精度����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������保持性好、刚度好的特点,可����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������通过预压螺母的形式实现零背隙。同时,行星滚柱丝����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������杠耐冲击能力强、受力均匀����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������、寿命长,且具有一定的自锁特性,因此作为人形����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������机器人腿部关节时可以起到节能的作用。
主要产品如下:

2.����� �������Ƴ������� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������旋转关节模组
旋转关节模组是由无框力矩电机、减����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������速器、力传感器、编码器、驱动器等核心零部件组成,采用无框����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������力矩电机、减速器、编码器、����� �������Ƴ������������ �������Ƴ����������� �������Ƴ����������� �������Ƴ�������驱动器一体化设计,可以实现精准的速度控制、位����� �������Ƴ������������ �������Ƴ������������ �������Ƴ����������� �������Ƴ�������置控制和力控制。同时,旋转关节模组采用多种减速形式匹配具体应用部位,可灵活选������� �������Ƴ������������ �������Ƴ������������ �������Ƴ����������� �������Ƴ���������� �������Ƴ���������� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ���������择高减速比或准直驱方案,以实����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������现机器人各部位最优设计。
主要产品如下:

高承载机械臂是由4套旋转����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ�������关节模组和2套直线关节模组构成,采用全自研����� �������Ƴ������������ �������Ƴ������������ �������Ƴ����������� �������Ƴ�������形式和行星滚柱丝杠、军工����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������级材料,承载能力较同类型机械臂有较大����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������提升,可适配各类型智能机器人。同时,高承载����� �������Ƴ������������ �������Ƴ����������� �������Ƴ������������ �������Ƴ������机械臂通过正����� ������� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�����������Ƴ�������向设����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ������计,匹配各类型关节模组,通过运动控制和轨迹����� �������Ƴ����������� �������Ƴ������������ �������Ƴ������������ �������Ƴ�������规划,可实现精准的位置控����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������制和力控制。此外,机械臂具备快速响应能力,通����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������过各关节协调配合,摆臂速����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������度可达60°/s,满足快速性要����� �������Ƴ������������ �������Ƴ������������ �������Ƴ������������ �������Ƴ�������求。
主要产品如下: